

�����P���ڙC���ˣ����Ƹ������ߡ���Ԫ�ڡ��ж��y��
�r�g��2024-12-23 16:22:00���ߣ�LeeZhou��Դ���¸ߝ��坍�O����������QQ���g�������vӍ�����˾W��
���������a�\���^���У����w����ڕ��ܵ����h�����Lˮ�Օ���՚����g���Ķ���������ڸ��g�F��Įa�����S���r�g�����ƣ����ޱ��w�������ϻ����أ��ƓpÓ��F���������ӣ��ӄ��˹��w�Ĵ�ⸯ�g�������˃��ęCе���ȺͰ�ȫ���ܣ������Ҫ�����ޱ����M�з������P�ه�Ϳʩ����
��ǰ�ڃ��������Pʩ���У��ИI����u�������ڙC���˴����˹��߿����I����߾S�o�ˆT��Σ�U�h�������I�İ�ȫ�ԣ��������I�L�U����߹���Ч�ʣ��������@���Ľ���Ч������Ч�棬�����P����ʩ����u�M�����ܻ����Cе���r���������P���ڙC������u���ИI���Pע�����@������ζ������“��Ԫ��”����˺��Ρ�

���ڃ��ތ��ڴ����o���O�䣬���ޱ��湤���h�����s�����ڙC������Ҫ���d���P��ϴ�b�ã��ڃ��ޱ����M�г��P���I�������c���ߴ硢�Π����l���Ȇ��}���C������Ҫ����Ƅӡ����ߡ�ؓ�d��Խ�ϵȆ��}����ˣ����ڙC�����ܷ�ȫ��������ɸ߿����I�������������������������P�I���g��
�F�е����ڙC�������������c������φ��}�����ڙC�����ڹ��w�������»��ӣ������Եͣ����ܳ��d�����d�������ȱˡ���ˣ����ڙC�������댍�F�˹����Ԅӻ��Cеʩ���D׃����횴������ڙC���˸������ߵļ��g�ډ���
���ڙC���˵���Ҫ������ʽ������ؓ����������������������������w����������ճ�������ͷ����W�����ȣ���������ʽ�m���ڌ����Բ��Ϙ��ɵı��棬�ڱ��C�������x��ǰ���£��ܮa���h������������ʽ�������������ܵ�����ȱ�ݵ�Ӱ��^�ͣ����V�������ڃ����P�����I��
������ʽ���ڙC������������Դ�ɷ֞�늴�ʽ������ʽ�ɷN��늴�ʽ���ڙC�����������{��������ͻȻ��늻�������㌢��ɴ��������pС���M���������l�C���ˉ����¹ʣ�����ʽ���ڙC���˵����������ܔ��Ӱ푣�����������С���������xӰ��Ҿ��x���������{����Ŀǰ��������̓��ij��P���ڙC���ˣ�������ʽ��Ҫ���������������g��
�ɲ�����������+�Ď�ʽ���ߙC�����������F�Ƕ���Ď��ϣ�Ȼ���Ď����ߙC���������D���y�}���Ϗ��s�ޱڗl����ʹ��ԓ�N��ʽ����ʮ�����y����Ҫ���^������������������C���c�ƄәC������ϡ��������y���{���Ȇ��}��
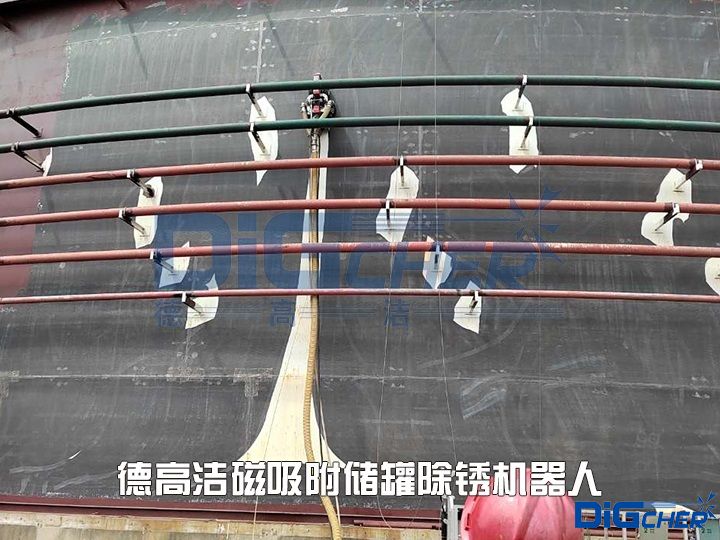
���ڴˣ��¸ߝ������аl��Ͷ��ʹ����һ��݆ʽ���������ڙC���ˣ��C���˸������������������������ڴ��w�����M�����I�����߂�һ��������Խ���������ɑ������ޱ��溸�p������ƽ��r���������ԽҰ�ױP݆ʽ�ӣ����ϙC�����\�еķ����ԣ��ɳ���200kgؓ�d���܉���280MPa��ˮ���_�������M�з������Pʩ����
�¸ߝ������������P�C���ˣ����d���P��ϴ�����I�����ߙC�������ڙC���������b�á����ϵ�y�Լ����ܻ�����ϵ�y�OӋ��һ�w�����ó��߉�ˮ�������P���܉��Ч�ʸ��|����������I������Ч�ʿ��_��70 m²/h�����P�ȼ����_Sa2.5��������ճ��Ż����b�ã������P��ϴ��ďUˮ�������M�л��գ����ژO���������������M���坍�������m���ڴ��̓����P�S�o������
�¸ߝ���2015���۽����ܻ������ػ����C���˻����I��ϴ���g���о������g�����аl��Ͷ���Ј�һϵ�ЙC���ˣ��߉�ˮ���P���ڙC���ˡ��������������ڙC���ˡ��ܵ����p��ĥ�C���ˡ��ԄӇ�Ϳ���ڙC���ˡ���ɰ���ڙC���˵ȣ������ͽ��ٱ����M���Ԅӻ���ɰ�����P����ϴ����Ϳ�ȣ���ʯ����������������ИI�õ��ˏV���đ��á��¸ߝ��ɞ��Ñ��ṩ�Ԅӻ��C�����O��+���Iʩ���Fꠣ��ṩ��������Ԅӻ����P����ϴ����Ϳʩ�����գ�����������gӭ�Ԓϵ���¸ߝ������\�������ա�
��ǰ�ڃ��������Pʩ���У��ИI����u�������ڙC���˴����˹��߿����I����߾S�o�ˆT��Σ�U�h�������I�İ�ȫ�ԣ��������I�L�U����߹���Ч�ʣ��������@���Ľ���Ч������Ч�棬�����P����ʩ����u�M�����ܻ����Cе���r���������P���ڙC������u���ИI���Pע�����@������ζ������“��Ԫ��”����˺��Ρ�
���ڃ��ތ��ڴ����o���O�䣬���ޱ��湤���h�����s�����ڙC������Ҫ���d���P��ϴ�b�ã��ڃ��ޱ����M�г��P���I�������c���ߴ硢�Π����l���Ȇ��}���C������Ҫ����Ƅӡ����ߡ�ؓ�d��Խ�ϵȆ��}����ˣ����ڙC�����ܷ�ȫ��������ɸ߿����I�������������������������P�I���g��
�F�е����ڙC�������������c������φ��}�����ڙC�����ڹ��w�������»��ӣ������Եͣ����ܳ��d�����d�������ȱˡ���ˣ����ڙC�������댍�F�˹����Ԅӻ��Cеʩ���D׃����횴������ڙC���˸������ߵļ��g�ډ���
���ڙC���˵���Ҫ������ʽ������ؓ����������������������������w����������ճ�������ͷ����W�����ȣ���������ʽ�m���ڌ����Բ��Ϙ��ɵı��棬�ڱ��C�������x��ǰ���£��ܮa���h������������ʽ�������������ܵ�����ȱ�ݵ�Ӱ��^�ͣ����V�������ڃ����P�����I��
������ʽ���ڙC������������Դ�ɷ֞�늴�ʽ������ʽ�ɷN��늴�ʽ���ڙC�����������{��������ͻȻ��늻�������㌢��ɴ��������pС���M���������l�C���ˉ����¹ʣ�����ʽ���ڙC���˵����������ܔ��Ӱ푣�����������С���������xӰ��Ҿ��x���������{����Ŀǰ��������̓��ij��P���ڙC���ˣ�������ʽ��Ҫ���������������g��
�ɲ�����������+�Ď�ʽ���ߙC�����������F�Ƕ���Ď��ϣ�Ȼ���Ď����ߙC���������D���y�}���Ϗ��s�ޱڗl����ʹ��ԓ�N��ʽ����ʮ�����y����Ҫ���^������������������C���c�ƄәC������ϡ��������y���{���Ȇ��}��
���ڴˣ��¸ߝ������аl��Ͷ��ʹ����һ��݆ʽ���������ڙC���ˣ��C���˸������������������������ڴ��w�����M�����I�����߂�һ��������Խ���������ɑ������ޱ��溸�p������ƽ��r���������ԽҰ�ױP݆ʽ�ӣ����ϙC�����\�еķ����ԣ��ɳ���200kgؓ�d���܉���280MPa��ˮ���_�������M�з������Pʩ����
�¸ߝ������������P�C���ˣ����d���P��ϴ�����I�����ߙC�������ڙC���������b�á����ϵ�y�Լ����ܻ�����ϵ�y�OӋ��һ�w�����ó��߉�ˮ�������P���܉��Ч�ʸ��|����������I������Ч�ʿ��_��70 m²/h�����P�ȼ����_Sa2.5��������ճ��Ż����b�ã������P��ϴ��ďUˮ�������M�л��գ����ژO���������������M���坍�������m���ڴ��̓����P�S�o������
�¸ߝ���2015���۽����ܻ������ػ����C���˻����I��ϴ���g���о������g�����аl��Ͷ���Ј�һϵ�ЙC���ˣ��߉�ˮ���P���ڙC���ˡ��������������ڙC���ˡ��ܵ����p��ĥ�C���ˡ��ԄӇ�Ϳ���ڙC���ˡ���ɰ���ڙC���˵ȣ������ͽ��ٱ����M���Ԅӻ���ɰ�����P����ϴ����Ϳ�ȣ���ʯ����������������ИI�õ��ˏV���đ��á��¸ߝ��ɞ��Ñ��ṩ�Ԅӻ��C�����O��+���Iʩ���Fꠣ��ṩ��������Ԅӻ����P����ϴ����Ϳʩ�����գ�����������gӭ�Ԓϵ���¸ߝ������\�������ա�
��һƪ�����ڙC���ˣ��������P��Ϳ����ʩ���r�����¼��g
��һƪ��
���T������
